Starting a PhD is confusing in a way that's hard to admit out loud: you often don't know what to study. Picking a direction means reading hundreds of papers, spotting gaps that aren't obvious yet, and committing to a path before you fully understand the terrain. Most students spend months just getting to the point where they can write a defensible proposal.
We ran K-Dense Web through this process to see what it could produce. Given a single prompt about biologically inspired robot actuators, it surveyed the literature, identified research gaps, and generated a 26-page PhD proposal in about 45 minutes.
What makes this field hard to navigate
Soft robotics draws from materials science, biomechanics, control theory, and mechanical engineering. Papers are scattered across dozens of journals, paradigms compete, and it's genuinely unclear which problems count as solved. For a new researcher, volume alone is the first obstacle.
The real question isn't "what's interesting?" It's "where is there actually room to do something new?"
How the pipeline works
A single prompt describing the research domain kicked off a four-step process.
Step 1: Literature synthesis
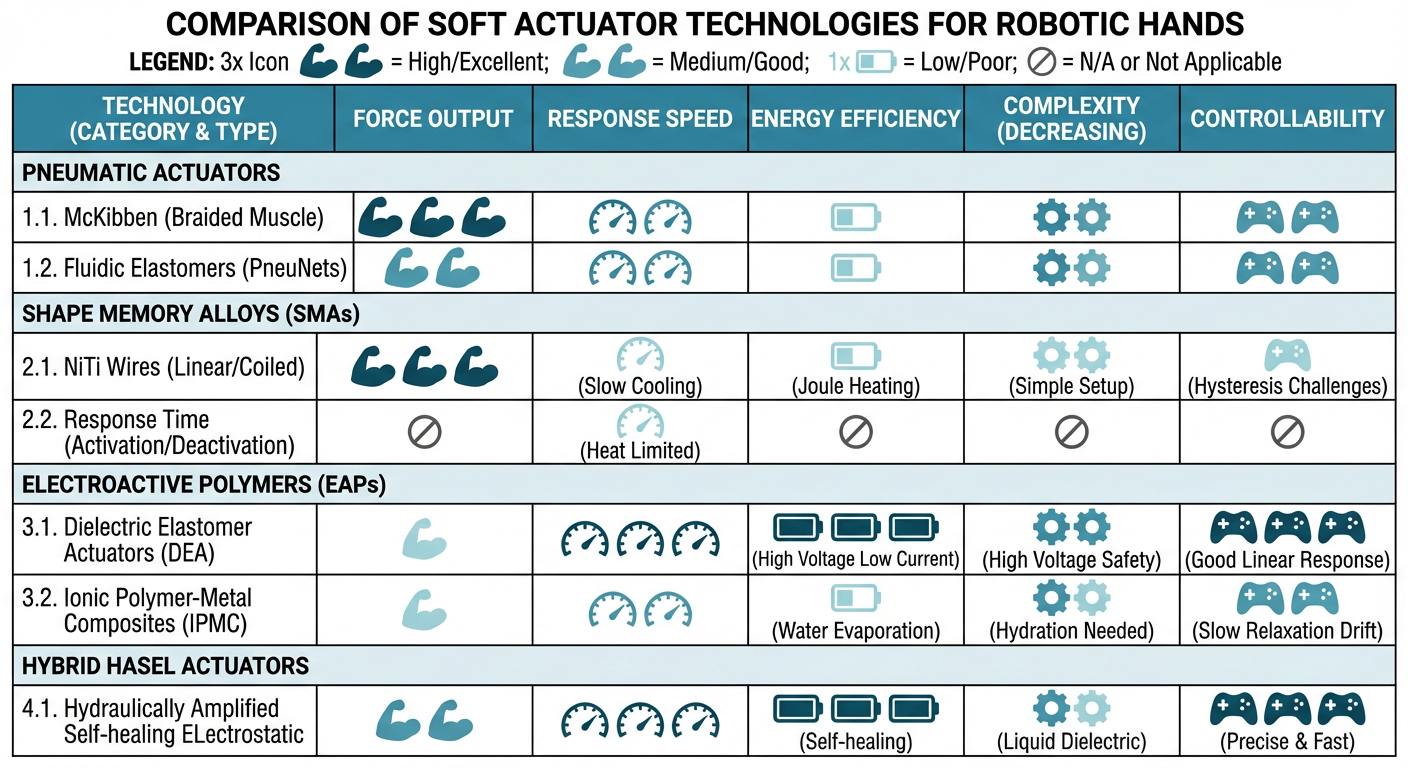
K-Dense Web surveyed the state-of-the-art across seven technology areas:
| Technology | Key findings | Leading groups |
|---|---|---|
| Soft pneumatic actuators | McKibben muscles, fabric-based, pumpless designs | Harvard, MIT |
| Shape memory alloys | Sub-second response now achievable | Multiple |
| Electroactive polymers | DEAs reaching 100%+ strain | Auckland, EPFL |
| HASEL actuators | Self-healing capability demonstrated | Colorado |
| Hybrid systems | Emerging integration approaches | Various |
| Morphological computation | Theoretical frameworks maturing | Bristol, Zurich |
| Bio-inspired hands | Anatomical fidelity improving | Multiple |
This included 35+ verified citations from Nature, Science, Nature Communications, and specialized robotics journals, with emphasis on work from 2023–2025.
Step 2: Gap analysis
From the synthesis, five gaps came out clearly:
Gap 1: Actuation integration. No existing system combines the force density of pneumatics, the precision of SMAs, and the bandwidth of EAPs in a single miniaturized package suited for anthropomorphic hands.
Gap 2: Morphological intelligence. Despite theoretical advances, few robotic hands actually exploit body dynamics for computation. The gap between theory and practice is wide.
Gap 3: Bio-mimetic translation. Human hand features like the extensor hood mechanism and lumbrical muscle coordination are rarely implemented in robotic designs.
Gap 4: Unstructured environment operation. Most soft hands are tested on standardized objects. Performance with unknown, deformable, or fragile objects is largely unexplored.
Gap 5: Scalable manufacturing. Current fabrication methods for soft actuators are mostly manual, which limits reproducibility and commercial viability.
Naming these gaps specifically is what turns a vague interest in a field into a defensible research question.
Step 3: Research directions
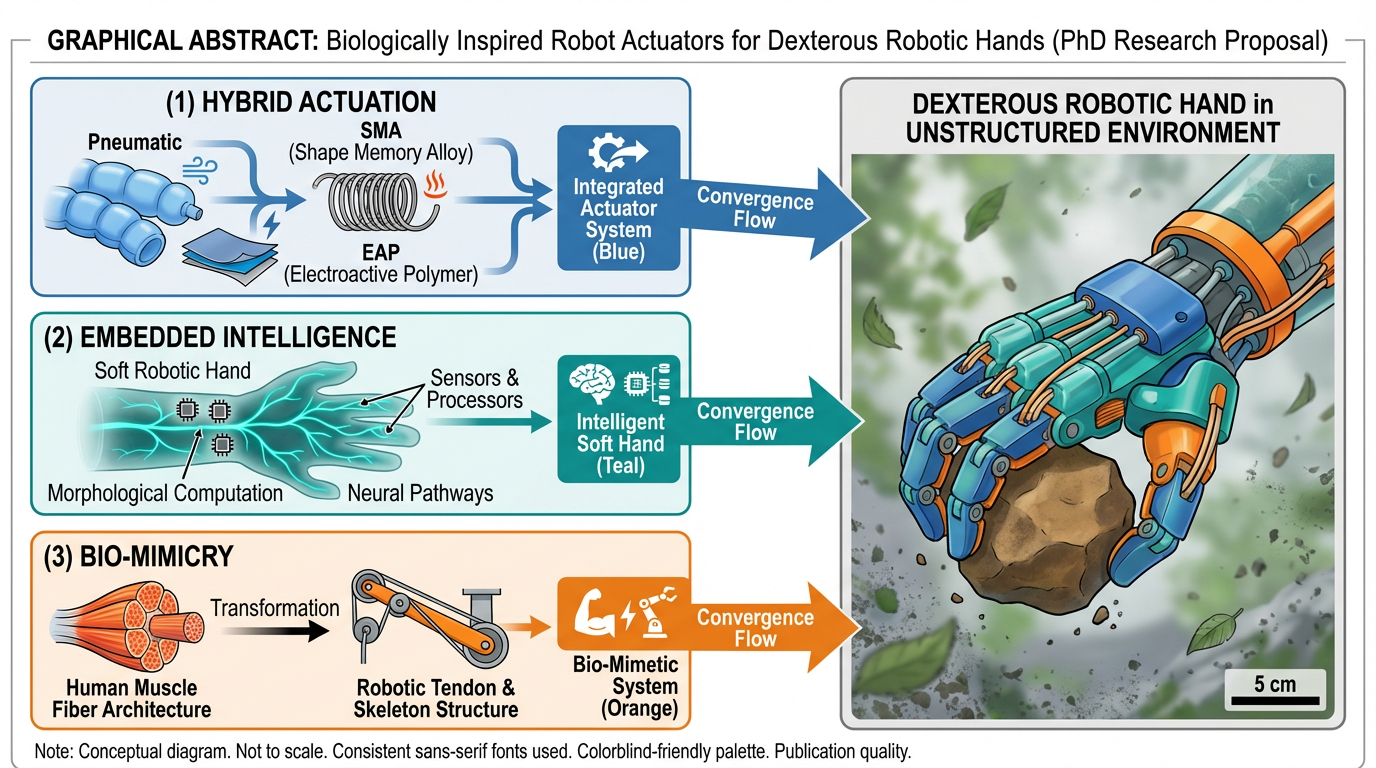
Based on the gaps, three connected research directions emerged:
Direction 1: Hybrid actuation architectures. Combining pneumatic, SMA, and EAP technologies into multi-modal systems. Key ideas: simultaneously optimizing mechanical, thermal, and electrical domains; using different technologies at different spatial scales; addressing the SMA heating problem through integrated thermal management.
Direction 2: Embedded intelligence through morphological computation. Using physical body properties to offload computation and enable adaptive grasping. This means finger geometries that inherently signal contact states, passive compliance that simplifies control, and tighter sensory-motor integration.
Direction 3: Bio-mimicry mechanisms. Translating human hand anatomy into robotic designs: variable stiffness tendon sheaths, extensor hood replication, and lumbrical-inspired flexion for independent MCP movement with IP extension.
Step 4: Methodology and timeline
K-Dense Web also generated the how, not just the what:
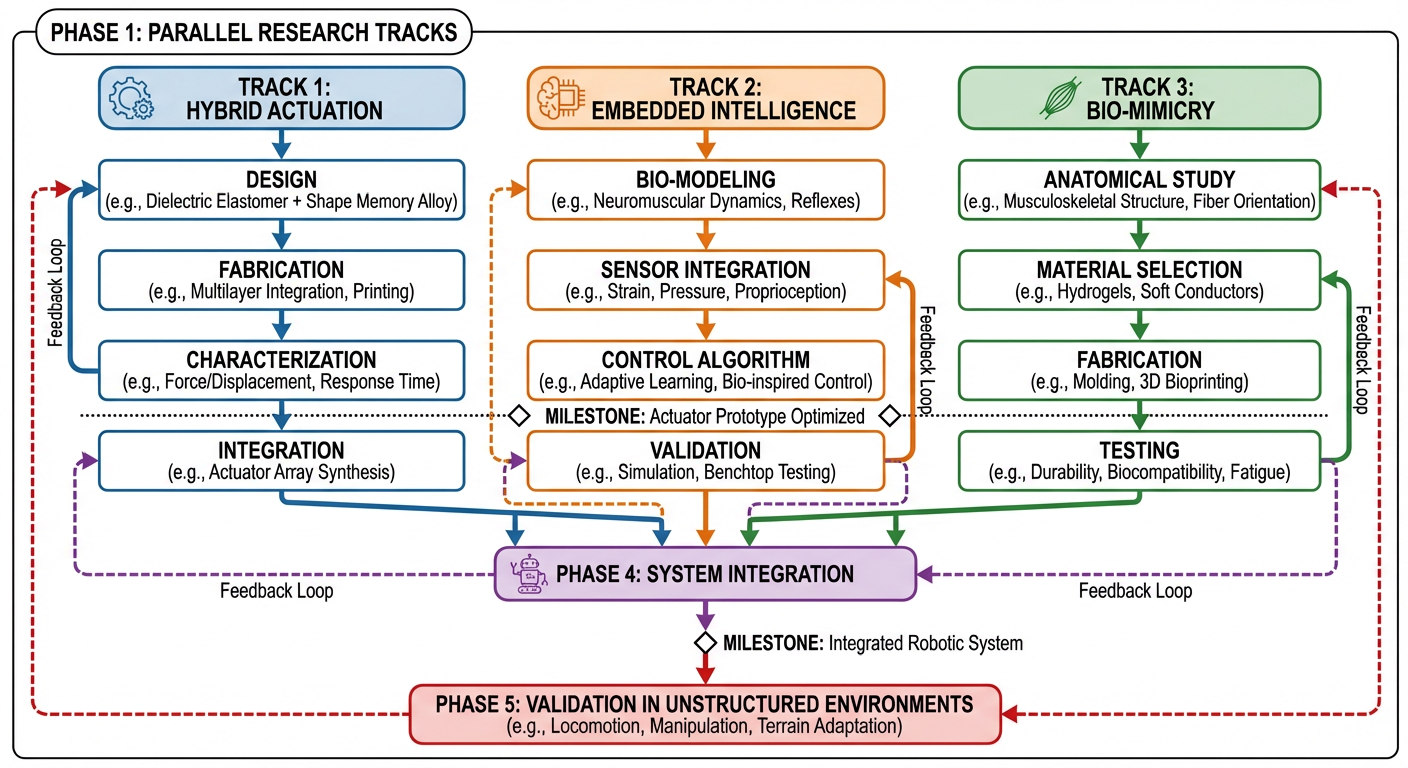
The methodology covers simulation (FEA for structural analysis, CFD for pneumatics), fabrication (multi-material 3D printing, soft lithography), and validation using the YCB object set and GRASP taxonomy, with concrete performance targets: 100,000+ cycle fatigue life, 50ms response time.
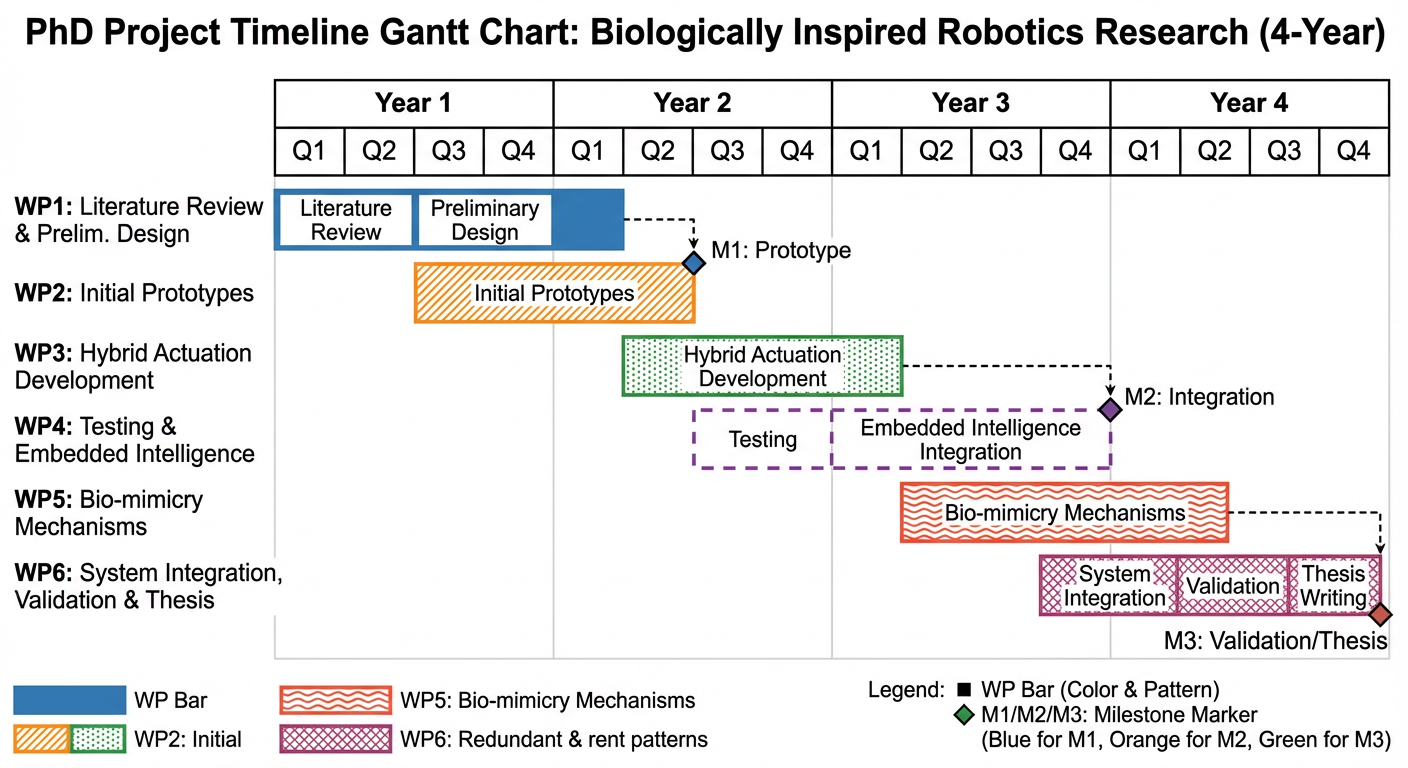
The 4-year timeline breaks into 8 work packages with milestones, deliverables, and go/no-go decision points.
The complete output
The final document is a 26-page PhD proposal:
| Component | Details |
|---|---|
| Executive summary | Project overview and key contributions |
| Literature review | 7 technology areas, 35+ citations |
| Gap analysis | 5 research opportunities |
| Research directions | 3 tracks with 9 proposed innovations |
| Methodology | Simulation, fabrication, validation approaches |
| Timeline | 4-year plan with 8 work packages |
| Impact statement | Scientific, economic, societal contributions |
| Bibliography | Verified, formatted citations |
| Figures | 7 diagrams and visualizations |
Total generation time: ~45 minutes
Peer review assessment
K-Dense Web runs an automated peer review pass on the output:
| Criterion | Score | Assessment |
|---|---|---|
| Scientific merit | 4.5/5 | Strong theoretical foundation |
| Innovation | 4.5/5 | Novel hybrid approach |
| Methodology | 4.0/5 | Well-structured, needs preliminary data |
| Feasibility | 4.0/5 | Ambitious but achievable |
| Impact potential | 5.0/5 | High relevance to market trends |
Overall: 4.4/5 — Accept with minor revisions
What this actually saves
The traditional path to a defensible PhD proposal looks something like this: 3–6 months of reading, dozens of conversations with advisors and domain experts, multiple rounds of drafts, and enough depth to spot gaps that aren't obvious. That's before a single experiment runs.
K-Dense Web compresses that. It can survey literature across multiple subfields at once, find structure in the findings, and propose specific innovations tied to real gaps. It also produces the artifacts—figures, timelines, formatted documents—not just analysis.
Here is a realistic comparison for this specific output: a 26-page research proposal, literature synthesis across multiple subfields, gap analysis, research directions, methodology, timeline, bibliography, and figures.
Time and cost comparison
Assumptions:
- The researcher is already scientifically trained but new to this exact niche.
- The goal is a serious first proposal draft suitable for advisor review, not a final funded grant application.
- Human labor is valued at $75/hour fully loaded, roughly covering salary or stipend, benefits, overhead, and institutional cost. Advisor or senior expert time is valued at $150/hour.
- The traditional workflow includes reading and triage, note synthesis, gap analysis, proposal drafting, figure creation, citation cleanup, and revision.
- K-Dense Web output still requires human review, citation spot-checking, advisor discussion, and adaptation to the researcher's lab, equipment, and constraints.
| Workflow | Focused researcher time | Senior review time | Elapsed time | Estimated labor cost |
|---|---|---|---|---|
| Researcher without K-Dense Web | 250–500 hours | 15–30 hours | 3–6 months | $21,000–$42,000 |
| Researcher using K-Dense Web | 6–12 hours | 2–5 hours | 1–3 days | $750–$1,650, plus K-Dense Web usage |
The important comparison is not 45 minutes versus 6 months. The 45-minute generation run creates the first structured version. A careful researcher should still spend a day or two reviewing the claims, checking citations, removing weak ideas, and aligning the proposal with their own lab context.
Even with that review time included, the difference is large: roughly one to three days of focused work instead of a quarter to half a year of orientation and drafting. In labor terms, that is on the order of $20,000–$40,000 of research planning effort avoided or redirected toward higher-value judgment, experiments, and advisor feedback.
It doesn't replace a researcher's judgment. It gives you a structured starting point in days rather than months.
Other use cases
The same process applies to grant applications (NEH, NIH, DARPA, foundations), corporate R&D planning, systematic literature reviews for emerging fields, lab direction decisions, and technology roadmaps.
Where the researcher still matters
The output is a starting point, not a finished product. A researcher using it would still need to validate the gap analysis against their own reading, prioritize based on available resources, add preliminary data from pilot experiments, refine the methodology for their specific equipment and collaborators, and bring their own perspective to the narrative.
The proposal that takes K-Dense Web 45 minutes would take months to develop from scratch. What you do with it is still up to you.
Try it
Whether you're a PhD student looking for a dissertation topic, a PI thinking about lab direction, or a company exploring new technology areas, K-Dense Web can help map the literature and surface promising directions.
Start exploring research directions on K-Dense Web →
This case study was generated from K-Dense Web. View the complete example session including all figures and the automated peer review, or download the full 26-page PhD proposal PDF directly.